산업용 로봇의 기본 구조는 일반적으로 다음과 같은 핵심 부품들로 구성됩니다. 각 부품의 기능과 한국 내 소싱 현황을 현업 입장에서 간단히 알려 드립니다.
1. 구동부 (Actuator)
역할: 로봇 관절을 움직이는 동력원. 대부분의 산업용 로봇은 서보모터를 사용.
한국 내 소싱 방안:
국산화율 낮음. 고성능 서보모터는 대부분 일본(파나소닉, 야스카와), 독일(지멘스), 스위스(ABB) 제품 사용.
국내 대체:
LS 산전 등
중소기업:
하이젠 모터 등에 있으나 국내 한정.
2. 감속기 (Reducer)
역할: 고속의 모터 회전을 저속 고토크로 바꿔주는 장치. RV 감속기, 하모닉 감속기가 주류.
한국 내 소싱 방안:
RV 감속기: 일본 나브테스코가 글로벌 시장 점유율 약 60~70%.
국내 대체:
하모닉 감속기: 한화정밀기계, 일진 등
RV 감속기: 국산화 시도 중이나 전체 라인업이 부족하거나 성능이 안나옴
3. 제어기 (Controller)
역할: 로봇의 전체 동작을 제어하는 두뇌 역할.
한국 내 소싱 방안:
자체 개발 비중 높음. 대부분 로봇 제조사에서 자사 로봇용으로 설계 및 제작.
국내 기업: LS 산전, 로보스타, 한화로보틱스, 두산로보틱스 등에서 자체 개발 제어기 보유.
4. 센서 (Sensor)
역할: 위치, 속도, 토크, 힘 등을 감지.
한국 내 소싱 방안:
고정밀 힘/토크 센서, 엔코더는 해외 의존도 높음 (HEIDENHAIN, Renishaw 등).
국내 대체:
엔코더 전문 중소기업 등에서 일부 국산화 제품 보유.
5. 기구 구조 (Mechanical Structure)
역할: 로봇의 팔, 관절 등 실제 움직이는 물리 구조.
한국 내 소싱 방안:
국내에서 주물 소재/가공 등이 가능하나 영세한 업체가 많음. 일부 해외(일본 등) 은 판매 대상 국가의 현지 소재/가공 업체를 가지고 거래함.
6. 통신 및 인터페이스 모듈
역할: PLC, HMI 등 공장 자동화 시스템과의 연동.
한국 내 소싱 방안:
EtherCAT, CAN, Profinet 등 국제 표준 사용. 일부 라피넷과 같은 국산도 존재.
이상입니다.
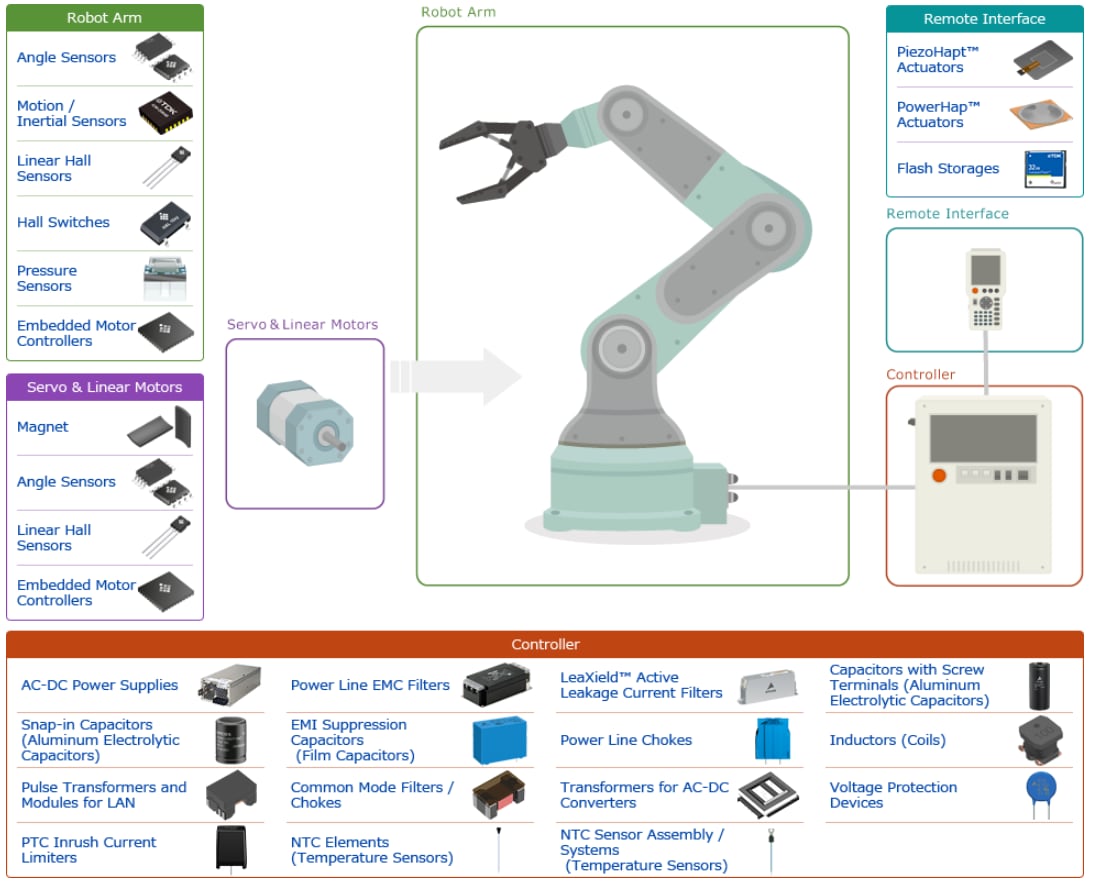
*그림 출처: TDK 산업용로봇 어플리케이션
'산업용 로봇 및 인공지능' 카테고리의 다른 글
| ChatGPT 일상과 연구에 유용한 팁 (0) | 2025.05.13 |
|---|---|
| 산업용 로봇의 구성 형태와 예시들 (0) | 2025.05.13 |
| [커피한잔값으로] 산업용 로봇과 산업의 이해 (2) | 2025.05.12 |
| 전류만을 이용해 케이블 고장 진단을 해보자. (0) | 2024.07.05 |
| Attention recurrent neural network 이용한 케이블 초기 고장 (0) | 2024.07.05 |